Biography
Kavit is a graduate student and a student researcher at Worcester Polytechnic Institute. His research interest is in Motion Planning and Controls for autonomous robot navigation. He is a passionate software developer and enthusiastic about new inventions. Apart from academics, he is a swimmer, reader & an avid astrophile.
Vision : His vision is to develop the autonomy technology to assist humans in all walks of life.
Download my resumé.
Interests
- Motion Planning
- Obstacle Avoidance
- Autonomous Robot Navigation
Education
MS in Robotics, 2021
Worcester Polytechnic Institute
BTech in Mechanical Engineering, 2019
Sardar Patel College of Engineering
Skills
C++
ROS
Git
Python
Linux
OpenCV
SolidWorks
PyTorch
Augmented Reality
Experience
Student Researcher (Motion Planning)
Worcester Polytechnic Institute
Developing autonomous & assistive-autonomous robot navigation algorithm for smart tele-operated nursing robots to deployed in hospitals.
Graduate Learning Assistant
Worcester Polytechnic Institute
Taught calculus 4 and linear algebra to freshmen and sophomore students.
Student Researcher (MEMS)
Sardar Patel Institute of Technology
Achieved 10% design optimization of micro-cantilever beams for improved bio-sensing
Trainee Student
Air India
Managed aircraft re-construction and maintanenance activites of Boeing 777, Boeing 737 & Boeing 747-ER
Projects
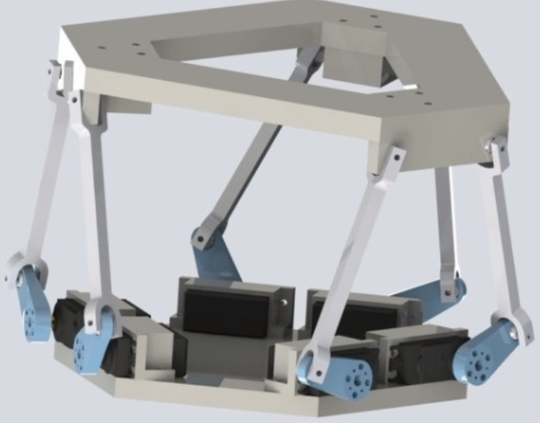
6-DOF platform for organ motion simulation
Engineered and simulated a 6-dof hexapod to mimic organ motion for effective robotic surgery

Combining A* and RRT* for autonomous indoor navigation of mobile robots
Developed a motion planning stack by combining multiple algorithms for effective indoor navigation.
Dynamic motion planning for autonomous and semi-autonomous mobile robot navigation
Developing a dynamic motion planning approach with active obstacle avoidance for mobile robots by planning in velocity spaces
Maze Solving with Search Algorithms
Solved a py-game generated maze using different search algorithm such as A*, Weighted A*, BFS, DFS, Dijkstra

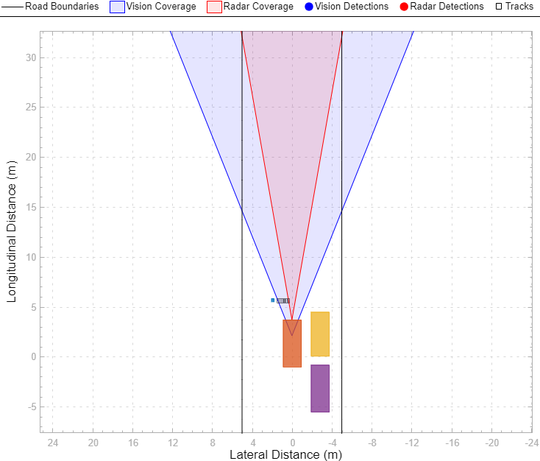
MPC controller for ADAS applications
Developed an MPC-based trajectory tracking controller for combined velocity and steering control.
RoboNav - Autonomous robot navigation using reinforcement Learning
Trained robot agent on DQN and DDPG to autonomously navigate in an indoor dynamic environment

RTAB-Map for indoor 3d mapping using mobile robot
Implemented an appearance-based graph-SLAM technique to generate a 3d map of indoor environment using turtlebot
Visualization Enhancement of NDT data using Augmented Reality
Developed a novel framework for visualizing surface defects on specimen using Augmented Reality
Accomplishments
C++ (Basic)
See certificateRobotics Software Engineer
See certificateCourse on CATIA V5
Certified user of CATIA V5, a highly versatile 3D modelling software
Contact
- kshah@wpi.edu
- +1 508 3108137
- 228 Highland Street, Worcester, MA 01609
- Connect on LinkedIn