Course : Robot Controls
Problem Statement : To develop a robust controller module to control velocity and steering angle of a vehicle.
Application : Using the developed MPC module for lane-keeping, lane-changing and many other ADAS applications.
About the project:
Generated a trajectory to be followed by the vehicle.
Developed from scratch our implementation of a closed-loop trajectory tracking MPC controller in MATLAB tp track the trajectory
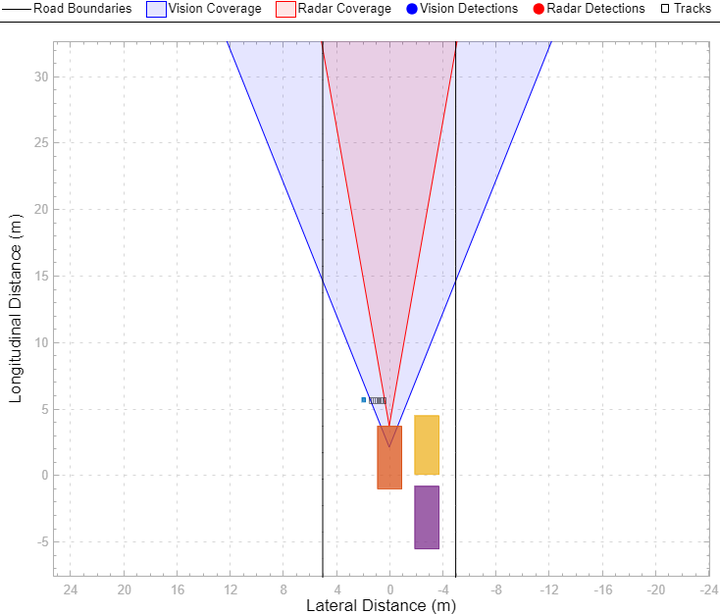
Also rendered it on Automated Driving Toolbox for a real-time visualization of vehicle following the required trajectory
Currently trying to implement it using C++ in CARLA where it could be used as a module for the autonomous driving applications.
Kavit Shah
MS in Robotics
My research interests include distributed robotics, mobile computing and programmable matter.