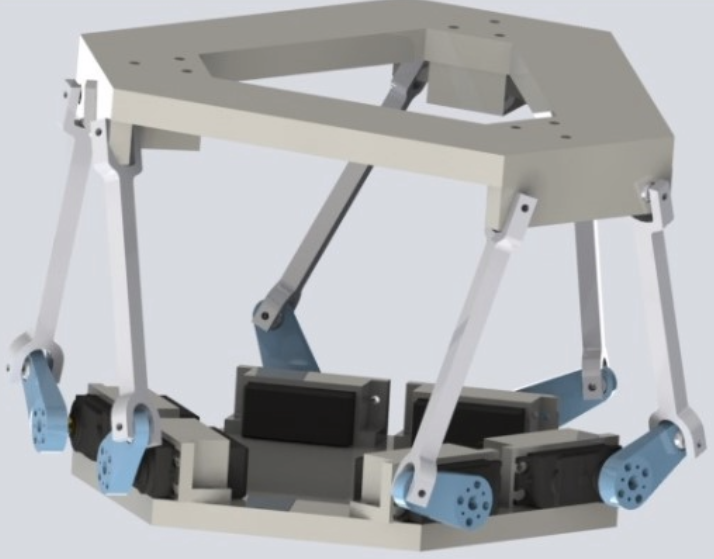
 SolidWorks preview of the engineered hexapod
SolidWorks preview of the engineered hexapodCourse : Robot Dynamics
Problem Statement : Simualate and mimic the dynamics of critical human organs with involuntary motions such as lungs, heart, eyes, etc.
Application : Effective tele-surgerical training of doctors and medical professionals
About the project:
Many organs undergo involuntary movements continually such as oscillations of lungs, breathing of heart, twitching of eyes, etc. These motions occur even during the surgery and could thus be an imperative hurdle in training the surgeons on performing remote surgeries using tele-assisted robots such as the Da-Vinci robot.
To solve solve this issue and aid the surgeons performing tele-operated surgery, we have designed a 6-dof Stewart’s platform.
The organ motion simulation employes a mathematical model, trajectory planning, inverse kinematica & dynamics, and position-velocity controller.
The 6-dof hexapod so designed was designed in SolidWorks, modelled in Simscape simulated and tested in Gazebo to accurately mimic human breathing motion.
Kavit Shah
MS in Robotics
My research interests include distributed robotics, mobile computing and programmable matter.